
Visió general
La grua de pont, coneguda comunament com a "conducció", és una mena de maquinària d'elevació àmpliament utilitzada a les empreses industrials i mineres, el seu mecanisme de funcionament es compon de tres sistemes de conducció bàsicament independents, sistema de conducció de cotxes, sistema de conducció de ganxos, inversor K-DRIVE al sistema de conducció anterior a tres reformat amb èxit, a continuació es descriu principalment el procés de transformació del sistema de conducció abans i després de caminar.

Esquema Avantatges
- Control vectorial de llaç obert de corrent orientat al camp, variables de motor totalment desacoblades, gran parell de baixa freqüència, resposta ràpida, etc.
- KD600 adopta el mode de control vectorial de bucle obert gratuït i el mode V/F vectoritzat, i amplifica la configuració del nivell de potència del primer engranatge;
- Interval de freqüència: Configuració del segment 0,5-600Hz, ajust continu continu;
- Interval de tensió de treball: 380V ± 20%, i la tensió del bus cau a 360VDC a l'instant per a un funcionament sense problemes;
- Capacitat de sobrecàrrega: 150% del corrent nominal, 1 minut permès; 200% de corrent nominal, 1s permesos;
- Característiques del parell: parell inicial, superior a 2 vegades el parell nominal; Parell de baixa freqüència, superior a 1,6 vegades el parell nominal a 1 Hz; El parell de frenada és superior al parell nominal.
Característiques de funcionament
- El mecanisme d'elevació de la grua té un gran parell d'arrencada, que normalment supera el 150% del parell nominal. Si es tenen en compte la sobrecàrrega i altres factors, s'ha de proporcionar almenys el 200% del parell nominal durant el procés d'arrencada i acceleració;
- Quan el mecanisme d'elevació s'executa cap avall, el motor estarà en estat de generació d'energia regenerativa i ha de ser una frenada de consum d'energia o una retroalimentació regenerativa a la xarxa;
- La càrrega del mecanisme d'elevació canvia dràsticament quan l'objecte aixecat surt o toca el terra, i el convertidor de freqüència ha de ser capaç de controlar la càrrega d'impacte sense problemes;
- Com que la velocitat de desplaçament del mecanisme de desplaçament davanter i posterior de la grua no és alta durant el disseny mecànic, el convertidor es pot utilitzar per a una sobrevelocitat adequada per millorar l'eficiència de treball.
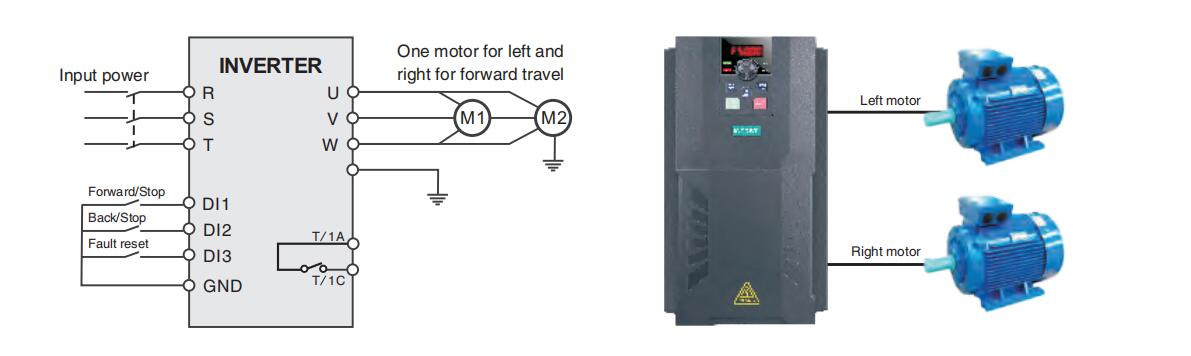
Esquema de cablejat senzill
Set de paràmetresng i descripció(paràmetres de desplaçament del motor esquerre i dret)
| Paràmetre | Explica | Configuració de paràmetres | Explica |
| P0-00=0 | Control VF | P5-00=1 | endavant |
| P0-04=1 | Parada d'arrencada terminal externa | P5-01=2 | dur a terme més tard |
| P0-06=1 | Configuració de freqüència digital | P6-00=2 | Sortida d'error del relé 1 |
| P0-14=60,00 | Freqüència màxima | P4-01=1,6KW | Potència del motor connectat |
| P0-16=60,00 | Freqüència límit superior | P4-02=380V | Tensió nominal del motor |
| P0-11=60,00 | Freqüència de configuració digital | P4-04=3,3A | Corrent nominal del motor |
| P0-23=3,0s | Temps d'acceleració | P4-05=50Hz | Freqüència nominal del motor |
| P0-24=2,0s | Temps de desacceleració | P4-06=960R/min | Velocitat nominal del motor |
| Nota: quan s'utilitza un convertidor de freqüència amb dos motors, és molt recomanable instal·lar un relé tèrmic coincident a l'extrem frontal de cada motor per protegir cada motor. | |||
Anàlisi de l'efecte de l'operació
El convertidor de freqüència de la sèrie KD600 ha dut a terme una transformació de conversió de freqüència al sistema de viatge, i l'efecte de transformació és relativament ideal, que es mostra principalment a:
- Es realitzen l'arrencada suau i la parada suau durant l'arrencada, la qual cosa redueix l'impacte a la xarxa elèctrica;
- Després d'utilitzar el convertidor de freqüència, s'ometen el contactor de canvi original i la resistència de regulació de velocitat, cosa que no només estalvia el cost de manteniment, sinó que també redueix el temps d'inactivitat per al manteniment, augmentant així la sortida;
- Quan el ganxo principal funciona a 5Hz ~ 30Hz, l'efecte d'estalvi d'energia és molt evident;
- El convertidor de freqüència s'utilitza per controlar el desplaçament davanter i posterior, i la sèrie de mecanismes de desplaçament esquerre i dret pot realitzar el treball de sobre freqüència. Sota la premissa de garantir la seguretat, es millora molt l'eficiència del treball i també es redueix la càrrega de treball de manteniment de l'equip de viatge a causa de la substitució freqüent dels contactors de CA.
Observacions de cloenda
El convertidor de freqüència s'utilitza per controlar la marxa davantera i posterior i la sèrie de mecanismes de marxa esquerra i dreta, que poden realitzar treballs d'overclocking, millorar considerablement l'eficiència del treball sota la premissa de garantir la seguretat i també reduir la càrrega de treball de manteniment de l'equip de conducció a causa de substitució freqüent de contactors de CA.
Lloc d'aplicació

Hora de publicació: 17-nov-2023